
I have been working on this post for well over a year, but it never made it out of my drafts because I didn’t feel comfortable with 3PAR. That all changed this year with the purchase and implementation of two 3PAR StoreServ 7000 series arrays. As an HP EVA customer, 3PAR has always been a compelling alternative, even before HP’s acquisition. The technology looked like close cousins to me. With HP’s introduction of the 7000 series at the end of 2012, it became even more clear this would be our future storage platform and I suspect the future platform for many EVA customers. This post is the first in a multi-part series about 3PAR from an EVA administrator’s point of view.

Close cousins, but different in important ways
Bottlenecks and single-points-of-failure seem to be the two things I combat most as a systems administrator. As a systems admin, you try and identify these points and plan for redundancy and capacity. We have to serve as the realists and the ‘doom-and-gloom’ guys because we plan for the worst case. When applying that concept to storage, it meant that we must purchase an array for our peak performance periods and we would need to often purchase more arrays to combat the problem of at most two controllers in an modular array.
But, newer arrays have come to market with much different architectures which directly combat the bottleneck problems we have traditionally observed in modular arrays. We have seen industry standard servers employed at storage controllers over a cluster of systems to create arrays (like HP’s Lefthand or VMware VSA solutions) and we have seen scale up architecures like the 3PAR StoreServ arrays which have an active-active mesh of up to 8 controllers to increase the performance.
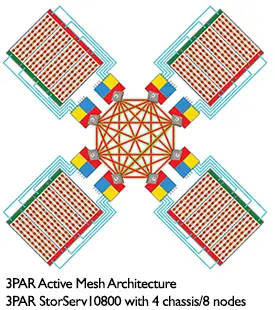 The active mesh architecture is the first big difference between our EVA’s and a 3PAR StoreServ. In an EVA, only a single controller may truly access and control a LUN at any given time. Any requests received through the other controller are simply proxied over and handled by the controlling controller. In the 3PAR, all controller nodes access and own the LUN and can service requests to it. All of this activity is sent across a passive, full-mesh backplane which connects the controller nodes to each other and to the storage shelves. The nodes are connected across high-speed links (800 Mbps in each direction), but also have a low-speed RS-232 serial link for redundancy for control information between nodes in case the main links fail.
The active mesh architecture is the first big difference between our EVA’s and a 3PAR StoreServ. In an EVA, only a single controller may truly access and control a LUN at any given time. Any requests received through the other controller are simply proxied over and handled by the controlling controller. In the 3PAR, all controller nodes access and own the LUN and can service requests to it. All of this activity is sent across a passive, full-mesh backplane which connects the controller nodes to each other and to the storage shelves. The nodes are connected across high-speed links (800 Mbps in each direction), but also have a low-speed RS-232 serial link for redundancy for control information between nodes in case the main links fail.
The second difference in architecture is related to scale and modularity. When you purchase an EVA, you get two controllers and that’s all it’ll ever have. With a 3PAR array, you can start with two controllers and scale up to a total of 8 controller nodes as your needs increase, depending on the line. The 3PAR StoreServ 7200 is limited to 2 controllers and the 7400 can scale from 2 to 4 controllers, while the 10000 series continues to scale to 8 controller nodes. This is a particular advantage when looking at cloud architecture which has increased the overall utilization of controllers and taxed them to the point of bottleneck on my arrays. HP has touted the P10000 3PAR method of modular controllers as the answer to cloud scale issues. While administrators must still size arrays to the peak, there is some ability to purchase what is needed and then scale up the controllers for the future, where its not possible today in the EVA line.
3PAR StoreServ can also address several storage tiers with different types of storage, mixing and matching volumes across types of storage as needed. While it was also possible to create multiple disk groups in EVA — one with traditional Fiber Channel drives and one with solid state drives, for instance — the EVA does not allow for mixing and matching data across multiple disk groups. With the 3PAR, however, autonomic storage tiering is a software feature of the array that allows chucklets of data to be spread across types of disk. The array can auto-magically determine where things should optimally be stored based on how often and how quickly they need to be access and move them from SATA to SAS to solid-state disks accordingly. This all occurs without an administrator having to actively manage it.
Thin provisioning is the probably the biggest difference between the arrays — not from a pure capability comparison but from how its employed in the array. Since the 3PAR aquisition, HP has brought thin to the EVA line, so from a check box perspective, they both have it.
 But 3PAR utilizes thin throughout its architecture. Thin is fully baked in the the 3PAR ASIC (or application specific integrated circuit) and so it is available at the lowest levels of the array. The array allows for fat to thin conversions of data non-disruptively through its proprietary algorithm. Replication is also handled using the thin-built-in technology through zero detection. Zero Detect, as the HP folks brand it, is a technology which detects and strips zeros from streams of data which makes it possible to no only encode data in a thin fashion on write, but also take data at rest and convert it to thin provisioned data in a timely manner.
But 3PAR utilizes thin throughout its architecture. Thin is fully baked in the the 3PAR ASIC (or application specific integrated circuit) and so it is available at the lowest levels of the array. The array allows for fat to thin conversions of data non-disruptively through its proprietary algorithm. Replication is also handled using the thin-built-in technology through zero detection. Zero Detect, as the HP folks brand it, is a technology which detects and strips zeros from streams of data which makes it possible to no only encode data in a thin fashion on write, but also take data at rest and convert it to thin provisioned data in a timely manner.
Since the HP acquisition of 3PAR, they have worked to make data more portable between storage platforms. Peer Motion was introduced during VMworld 2011 and it is federation technology and allows for zero-downtime relocation of storage from one array to another. Peer Motion is more in line with Storage VMotion in vSphere than a replication technology. The majority of the work is handled on the destination system which is receiving the storage volume. HP has introduced Online Migration, a one way migration from EVA to 3PAR StoreServ. For EVA shops, this is an important technology – since it will allow for non-disruptive moves of data from your EVA to a 3PAR array. The migration is configured through CommandView and at a basic level, involves the 3PAR fronting the EVA’s LUNs to the host and then transparently migrating the data behind the scenes until its all moved to the 3PAR and then removes the link to the EVA. Peer Motion is a major enabling technology for companies looking to migrate data in an automated way.
Stay tuned for part 2, launching next week, where we go deeper on 3PAR terminology for the EVA administrator.
